Платформа Arduino позволяет людям создавать различные проекты. Arduino — это удобная платформа с поддержкой широкого спектра библиотек, включая Программное обеспечениеСерийная библиотека . Программное обеспечениеСерийная библиотека позволяет вам создать последовательный порт на любом из цифровых контактов на вашей плате Arduino.
В этой статье мы углубимся в библиотеку SoftwareSerial и узнаем, как она работает.
Введение в библиотеку SoftwareSerial
Программное обеспечениеСерийная библиотека — это стандартная библиотека Arduino, которая обеспечивает последовательную связь на цифровых контактах, отличных от TX и RX. Библиотека позволяет создать программный последовательный порт, который можно использовать для связи с другими устройствами, такими как другие микроконтроллеры, компьютеры или даже модули Bluetooth. Библиотека SoftwareSerial входит в состав Arduino IDE и может использоваться с любой платой Arduino.
Примечание: В целом, Техас и RX контакты используются для последовательной связи, но с помощью этой библиотеки мы можем позволить плате Arduino использовать любые цифровые контакты для замены контактов TX и RX.
Понимание функций библиотеки SoftwareSerial
Программное обеспечениеСерийная библиотека имеет несколько функций, позволяющих настраивать программный последовательный порт и управлять им. Вот некоторые из основных функций, которые вы должны знать:
Программное обеспечениеСерийный()
Эта функция создает новый экземпляр ПОСерийный сорт. Эта функция имеет два аргумента: вывод RX и вывод TX. Например, если вы хотите создать программный последовательный порт на контактах 2 и 3, вы должны использовать следующий код:
Программное обеспечениеСерийный номер mySerial ( 2 , 3 ) ; // РС, Техас
Программное обеспечениеСерийный() метод используется для создания нового экземпляра ПОСерийный объект. Это позволяет создавать несколько экземпляров, однако одновременно может быть активен только один.
Синтаксис
Синтаксис для Программное обеспечениеСерийный() метод заключается в следующем:
ПОСерийный ( rxPin, txPin, обратная_логика )
Параметры
Параметры для Программное обеспечениеСерийный() являются
rxPin: Этот параметр указывает контакт, который будет использоваться для получения последовательных данных.
txPin: Этот параметр указывает вывод, который будет использоваться для передачи последовательных данных.
обратная_логика: Этот параметр является необязательным и инвертирует смысл входящих битов. Значение по умолчанию — false, что означает, что НИЗКИЙ уровень на выводе RX интерпретируется как 0-бит, а ВЫСОКИЙ — как 1-битный. Если установлено значение true, LOW на выводе RX теперь будет принимать 1 бит, а HIGH — 0 бит.
Возвращаться
Программное обеспечениеСерийный() ничего не возвращает.
Функции библиотеки Arduino SoftwareSerial()
Ардуино Программное обеспечениеСерийный() имеет список функций для последовательной связи между устройствами. Некоторые из основных функций обсуждаются здесь:
начинать()
начинать() Функция инициализирует программный последовательный порт со скоростью передачи данных. Скорость передачи — это скорость передачи данных через последовательный порт. Например, чтобы установить 9600 в качестве скорости передачи данных для последовательной связи, вы должны использовать следующий код:
mySerial.begin ( 9600 ) ;
доступный()
доступно () f unction возвращает байты, доступные для чтения через последовательный порт программного обеспечения. Например, чтобы проверить, доступны ли какие-либо данные для чтения, вы должны использовать следующий код:
если ( мойСерийный.доступный ( ) > 0 ) {// читать входные данные
char incomingByte = mySerial.read ( ) ;
}
читать()
читать() Функция считывает следующий байт данных из последовательного порта программного обеспечения. Например, чтобы прочитать байт данных и вывести его на последовательный монитор, вы должны использовать следующий код:
char incomingByte = mySerial.read ( ) ;Серийный.println ( входящий байт ) ;
писать()
писать() Функция записывает байт данных в программный последовательный порт. Например, отправить письмо «А» через последовательный порт программного обеспечения вы должны использовать следующий код:
mySerial.write ( «А» ) ;
Пример кода библиотеки Arduino SoftwareSerial()
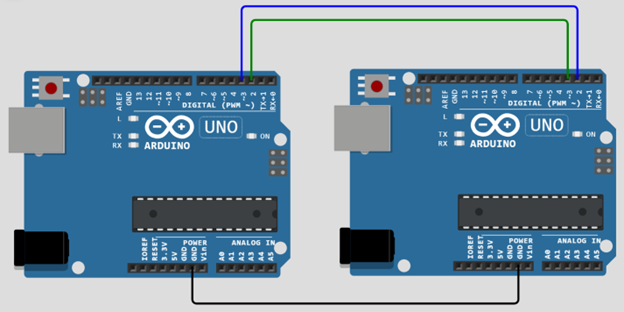
Теперь мы будем обмениваться данными между двумя платами Arduino через последовательную связь, используя эту библиотеку. Возьмите две платы Arduino и соедините их, как показано на изображении ниже.
Соединять Д2 платы Master Arduino с Д3 платы Slave Arduino, аналогично подключите Д3 Мастер Ардуино с Д2 Ведомого Ардуино.
Примечание: Для последовательной связи используется Техас контакт всегда подключен к RX контакт противоположного Arduino и RX вывод Мастера всегда подключен к Техас контакт другого Arduino.
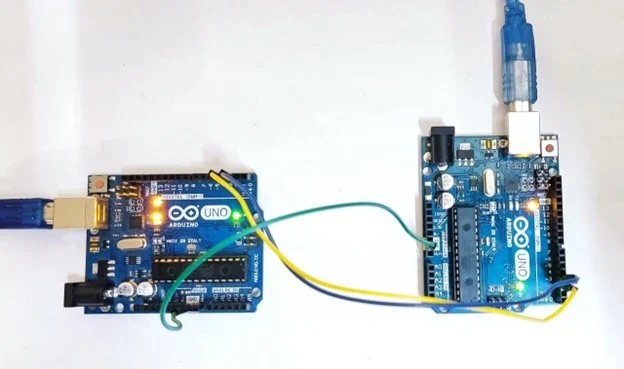
Ниже приведено аппаратное обеспечение обеих плат Arduino.
Вот пример кода Arduino, который демонстрирует, как использовать Программное обеспечениеСерийная библиотека для установления связи между двумя платами Arduino:
Код платы отправителя
Приведенный ниже код предназначен для отправляющей платы Arduino, которая запишет строку на принимающую плату Arduino.
#include// Настроить серийный объект программного обеспечения
Программное обеспечениеСерийный номер mySerial ( 2 , 3 ) ;
недействительная установка ( ) {
// Начать последовательную связь
Серийный.начало ( 9600 ) ;
пока ( ! Серийный ) {
; // ждать для последовательный порт для подключения
}
// Запустите последовательную связь программного обеспечения
mySerial.begin ( 9600 ) ;
}
пустая петля ( ) {
// Отправить сообщение через последовательное соединение программного обеспечения
mySerial.println ( 'Здравствуй, приемная плата!' ) ;
задерживать ( 1000 ) ;
}
Код платы приемника
Приведенный ниже код предназначен для платы приемника. Используя этот код, Arduino получит строку с другой платы через последовательную связь, установленную между двумя платами Arduino.
#include// Настроить серийный объект программного обеспечения
Программное обеспечениеСерийный номер mySerial ( 2 , 3 ) ;
недействительная установка ( ) {
// Начать последовательную связь
Серийный.начало ( 9600 ) ;
пока ( ! Серийный ) {
; // ждать для последовательный порт для подключения
}
// Запустите последовательную связь программного обеспечения
mySerial.begin ( 9600 ) ;
}
пустая петля ( ) {
// Проверять если данные доступны через последовательное соединение программного обеспечения
если ( мойСерийный.доступный ( ) ) {
// Прочитайте данные и распечатайте их на последовательном мониторе
Серийный.println ( mySerial.readString ( ) ) ;
}
}
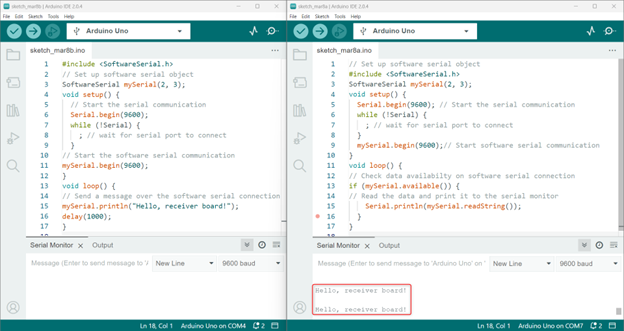
В этом примере мы сначала включаем Программное обеспечениеСерийная библиотека в начале кода. Затем мы создаем ПОСерийный объект под названием « мой сериал ” с контактами 2 и 3, указанными как контакты RX и TX соответственно.
в настраивать() функции, мы запускаем аппаратную и программную последовательную связь со скоростью 9600 бод. петля() функции платы отправителя, мы отправляем сообщение через последовательное соединение программного обеспечения, используя метод mySerial.println(), и ждем секунду перед отправкой следующего сообщения.
В функции loop() платы приемника код будет проверять доступность последовательных данных в программном последовательном соединении, используя мойСерийный.доступный() метод. Если данные доступны, мы считываем их с помощью метода mySerial.readString() и печатаем их на последовательном мониторе с помощью метода Serial.println().
Ограничения библиотеки SoftwareSerial()
Программное обеспечениеСерийная библиотека имеет несколько различных преимуществ, но также имеет некоторые ограничения, о которых должны знать пользователи. Эти ограничения включают
- Невозможность передачи и приема данных одновременно.
- При использовании нескольких программных последовательных портов только один порт может получать данные одновременно.
- Программные последовательные порты, созданные с использованием этой библиотеки, работают с меньшей скоростью передачи данных и не так надежны, как аппаратные последовательные порты.
- Некоторые контакты на платах Mega и Mega 2560 не поддерживают прерывания изменения для RX, что ограничивает количество используемых контактов.
- Точно так же на платах Leonardo и Micro только определенные контакты могут использоваться для RX из-за отсутствия прерываний изменения.
- Максимальная скорость приема на платах Arduino или Genuino 101 составляет 57600 бит/с.
- RX не работает на цифровом выводе 13 плат Arduino или Genuino 101.
| Доска | Приемные контакты |
| Мега и Мега 2560 | 10, 11, 12, 13, 14, 15, 50, 51, 52, 53, А8 (62), А9 (63), А10 (64), А11 (65), А12 (66), А13 (67), А14 (68), А15 (69).
|
| Леонардо и Мик | 8, 9, 10, 11, 14 (МИСО), 15 (СКК), 16 (МОСИ). |
Заключение
Программное обеспечениеСерийная библиотека в Arduino — полезный инструмент для связи с устройствами, использующими протоколы последовательной связи. Это позволяет разработчикам создавать программные последовательные порты, которые можно использовать вместе с аппаратными последовательными портами. У этой библиотеки есть некоторые ограничения, поскольку она не допускает одновременную передачу данных. Подробнее читайте в статье выше.