Прежде чем мы начнем взаимодействовать ESP32 с датчиком PIR, мы должны знать, как работают прерывания и как их читать и обрабатывать в ESP32. Давайте подробно обсудим работу PIR с ESP32.
Вот содержание этой статьи:
2: Вызов прерывания в ESP32 — MicroPython
3: Взаимодействие PIR-датчика с ESP32 — MicroPython
3.1: Датчик движения PIR (HC-SR501)
1: Что такое прерывания
Большинство событий, которые происходят в программировании ESP32, выполняются последовательно, что означает построчное выполнение кода. Для обработки и управления событиями, которые не нужно запускать во время последовательного выполнения кода, прерывания используются.
Например, если мы хотим выполнить определенную задачу, когда происходит какое-либо особое событие, или на цифровые выводы микроконтроллера подается триггерный сигнал, мы используем прерывание.
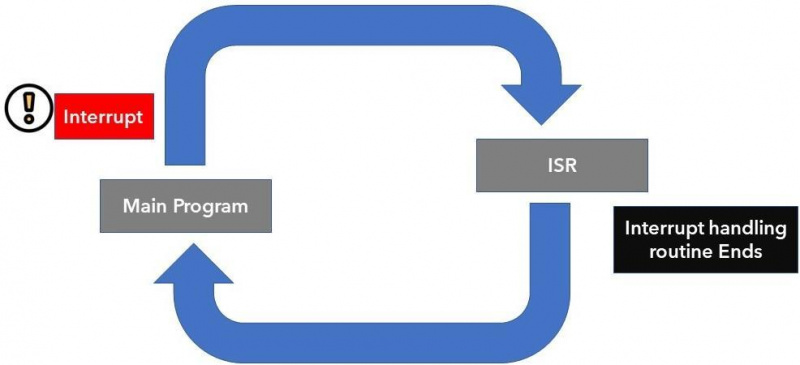
При прерывании нам не нужно постоянно проверять цифровое состояние входного контакта ESP32. Когда происходит прерывание, процессор останавливает основную программу и вызывается новая функция, известная как ISR ( Прерывание процедуры обслуживания ). Этот ISR Функция обрабатывает прерывание, вызванное после этого, вернуться в основную программу и начать ее выполнение. Одним из примеров ISR является датчик движения PIR, который генерирует прерывание при обнаружении движения.
1.1: Пины прерывания в ESP32
Внешнее или аппаратное прерывание может быть вызвано любым аппаратным модулем, например сенсорным датчиком или кнопкой. Прерывания касания происходят, когда обнаруживается прикосновение к контактам ESP32, или прерывание GPIO также может использоваться при нажатии клавиши или кнопки.
В этой статье мы вызовем прерывание при обнаружении движения с помощью датчика PIR с ESP32.
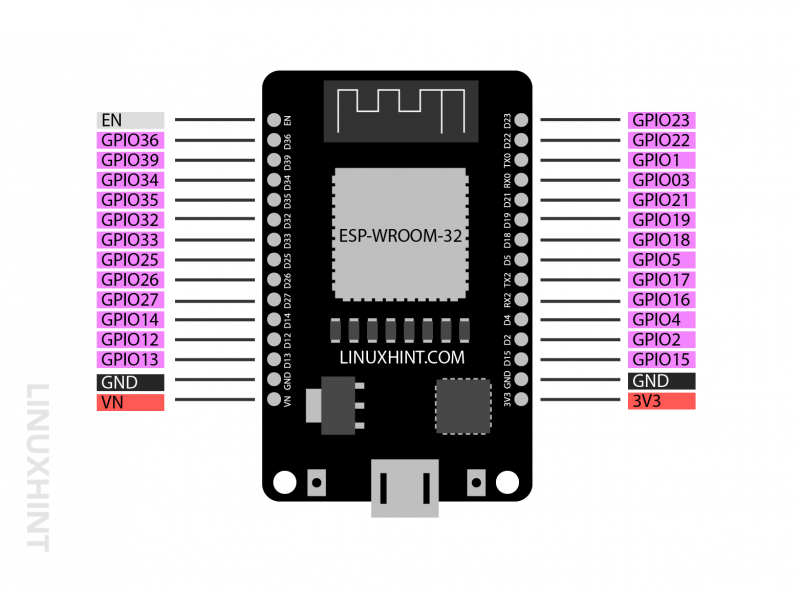
Почти все контакты GPIO, кроме 6 встроенных контактов SPI, которые обычно входят в комплект поставки. 36 выводная версия платы ESP32 не может использоваться для вызова прерывания. Итак, для получения внешнего прерывания в ESP32 можно использовать следующие выводы:
2: Вызов прерывания в ESP32 с помощью MicroPython
Чтобы запрограммировать плату ESP32 с датчиком PIR, используя код MicroPython. Мы должны определить функцию прерывания. Ниже приведены несколько простых шагов, которые помогут определить прерывание для платы ESP32.
Шаг 1: Инициализируйте функцию обработки прерываний: Функция обработки прерывания должна быть определена простым способом, чтобы она могла выполняться быстро и возвращаться в основную программу как можно быстрее. Это можно сделать, определив глобальную переменную, чтобы к ней можно было получить доступ в любом месте кода, если она вызывается.
Здесь, в случае датчика PIR, мы будем использовать контакт GPIO в качестве Глобальный переменная. Функция прерывания принимает вывод в качестве аргумента и описывает вывод GPIO, который вызывает выполнение функции прерывания.
def handle_interrupt ( штырь ) :Шаг 2: Настройте контакт GPIO для прерывания: Чтобы получить значение вывода GPIO, нам нужно создать объект, который будет получать от него ввод с помощью PIN.IN в качестве второго аргумента внутри нашего класса контактов. Мы можем переименовать это с любым другим.
штырь знак равно Штырь ( 13 , Штырь. В )Шаг 3: Прикрепите прерывание к контакту GPIO для датчика PIR, используя метод irq():
Используя приведенную ниже команду, мы можем установить прерывание на контакт, который мы определили ранее.
мост. прерывание ( курок знак равно Штырь. IRQ_RISING , обработчик знак равно handle_interrupt )прерывание() Метод используется для присоединения прерывания к контакту. прерывание() принимает два разных аргумента:
- Курок
- Обработчик
курок: Этот аргумент объясняет режим триггера. Ниже приведены три режима:
- Пин.IRQ_FALLING: Когда вывод переходит из состояния HIGH в состояние LOW, запускается прерывание.
- Вывод.IRQ_RISING: При переходе вывода из LOW в HIGH запускается прерывание.
- Вывод.IRQ_FALLING|Вывод.IRQ_RISING: Инициировать прерывание всякий раз, когда контакт меняет свое состояние. Любой контакт переходит в состояние HIGH или LOW.
обработчик: Эта функция будет вызываться после срабатывания прерывания.
3: Взаимодействие PIR-датчика с ESP32
Поскольку теперь мы рассмотрели концепции прерывания с ESP32 с использованием MicroPython, теперь мы будем связывать датчик PIR с ESP32. Здесь мы будем использовать Pin.IRQ_RISING mode в коде MicroPython для датчика PIR, потому что мы хотим запускать светодиод каждый раз, когда датчик PIR обнаруживает движение. Этот светодиод будет гореть в течение установленного времени, а затем выключится.
Потребуются следующие компоненты:
- Плата разработки ESP32
- Датчик движения PIR (HC-SR501)
- Резистор 220 Ом
- Перемычки
- Макет
- ВЕЛ
Схема для датчика PIR с ESP32:
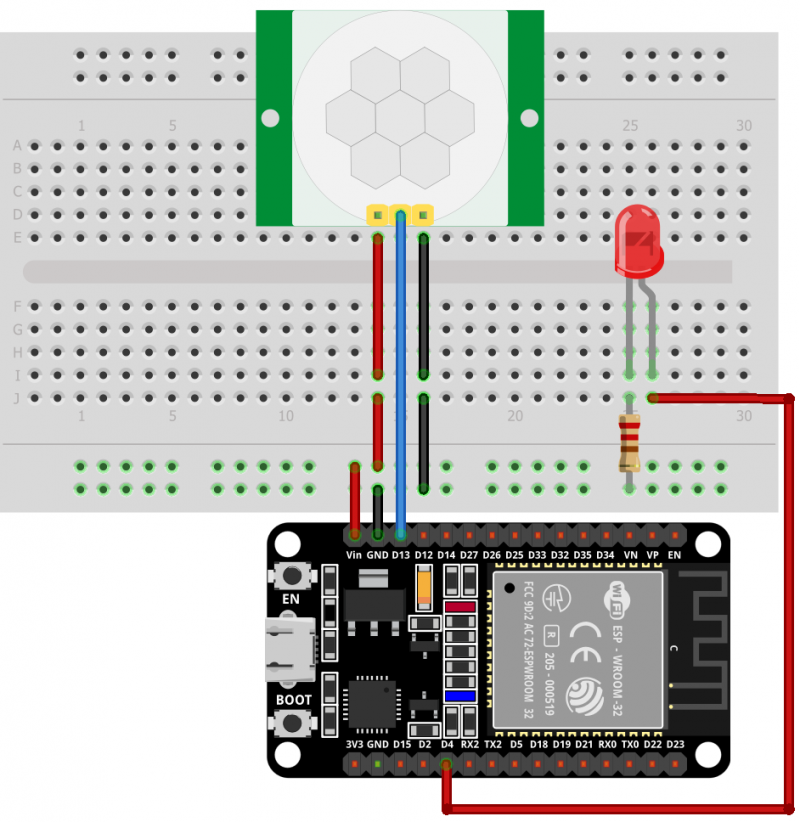
Конфигурация контактов ESP32 с датчиком PIR:
3.1: Датчик движения PIR (HC-SR501)
ПИР — это аббревиатура от Пассивные инфракрасные датчики . Два пироэлектрических датчика, используемых вместе, определяют количество тепла в окружающей среде. Оба этих пироэлектрических датчика расположены один за другим, и когда объект попадает в их диапазон, изменение тепловой энергии или разница сигналов между обоими этими датчиками приводит к тому, что выходной сигнал датчика PIR становится НИЗКИМ. Как только выходной контакт PIR становится НИЗКИМ, мы можем установить конкретную инструкцию для выполнения (светодиод мигает).
Ниже приведены характеристики датчика PIR:
- Чувствительность может быть установлена в зависимости от местоположения проекта (например, обнаружение движения мыши или листа).
- Датчик PIR можно настроить на то, как долго он обнаруживает объект
- Широко используется в домашней охранной сигнализации и других приложениях для обнаружения движения на основе теплового излучения.
3.2: Распиновка HC-SR501
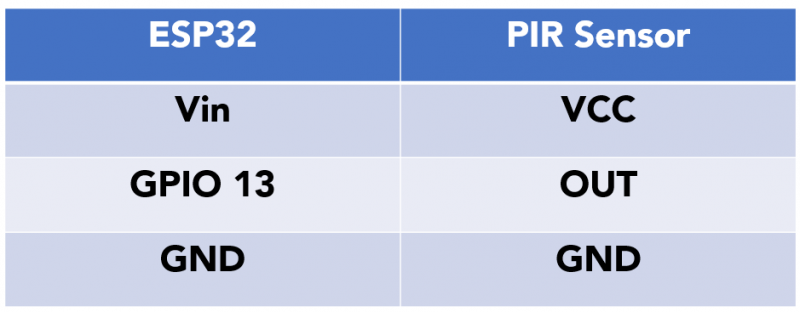
PIR HC-SR501 имеет три контакта. Два из них являются контактами питания для Vcc и GND, а один является выходным контактом для триггерного сигнала.
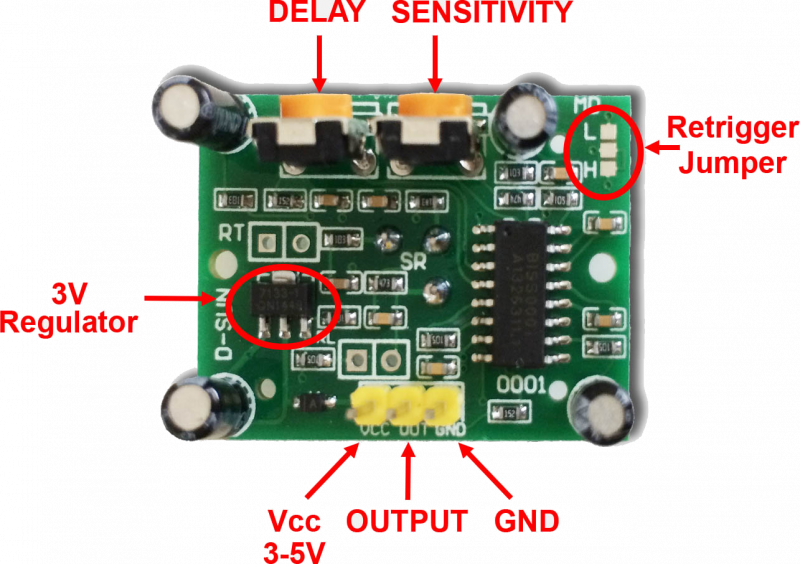
Ниже приводится описание контактов датчика PIR:
| Штырь | Имя | Описание |
| 1 | Вкк | Входной контакт для датчика Подключите к ESP32 Vin Pin |
| два | ВНЕ | Выход датчика |
| 3 | ЗАЗЕМЛЕНИЕ | Земля датчика |
Теперь, чтобы запрограммировать ESP32, напишите данный код в редакторе Thonny IDE или любой другой IDE MicroPython и загрузите его в ESP32.
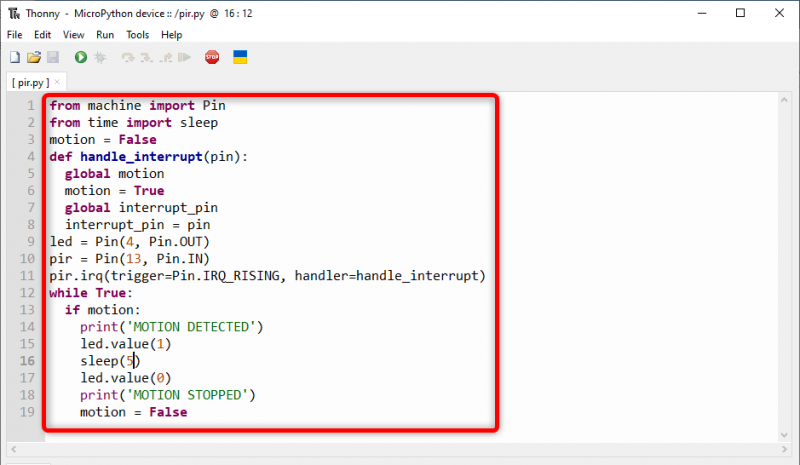
из импорта машины Pinиз время импортировать сон
движение знак равно ЛОЖЬ
def handle_interrupt ( штырь ) :
глобальное движение
движение знак равно Истинный
глобальный interrupt_pin
прерывание_контакт знак равно штырь
вел знак равно Штырь ( 4 , Штырь. ВНЕ )
мост знак равно Штырь ( 13 , Штырь. В )
мост. прерывание ( курок знак равно Штырь. IRQ_RISING , обработчик знак равно handle_interrupt )
пока Истинный :
если движение :
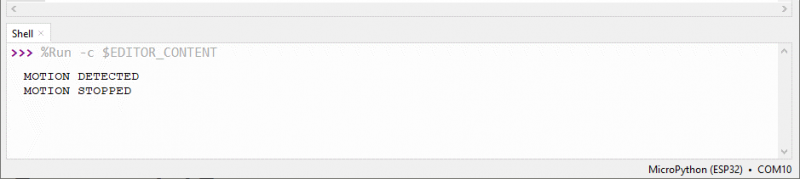
Распечатать ( «ОБНАРУЖЕНО ДВИЖЕНИЕ» )
вел. ценность ( 1 )
спать ( 5 )
вел. ценность ( 0 )
Распечатать ( 'ДВИЖЕНИЕ ОСТАНОВЛЕНО' )
движение знак равно ЛОЖЬ
Во-первых, мы импортировали штырь класс из машинного модуля и спать метод добавления задержки. Далее создается переменная с именем движение. Эта переменная будет определять, обнаружено ли движение или нет.
Затем мы создали функцию handle_interrupt. Эта функция активируется каждый раз, когда датчик PIR обнаруживает движение. Он принимает вывод в качестве входного параметра и указывает вывод, который вызывает прерывание.
Проще говоря, каждый раз, когда PIR обнаруживает движение, handle_interrupt установит для переменной движения значение true и сохранит контакт, вызывающий прерывание. Одна вещь, которую нужно помнить всегда декларирует движение переменная как глобальная, потому что она необходима во всем коде.
Двигаясь вперед, мы создали два объекта вывода, один для хранения выводов светодиода, а второй будет принимать выходной сигнал датчика PIR на выводе 13 GPIO. Далее мы объявили вывод триггера в ПОДЪЕМ режим.
в петля часть кода, он проверит значение переменной движения, как только оно станет истинным, светодиод включится, подключенный к контакту 4 ESP32. Если движение остановлено, светодиод погаснет через 5 секунд.
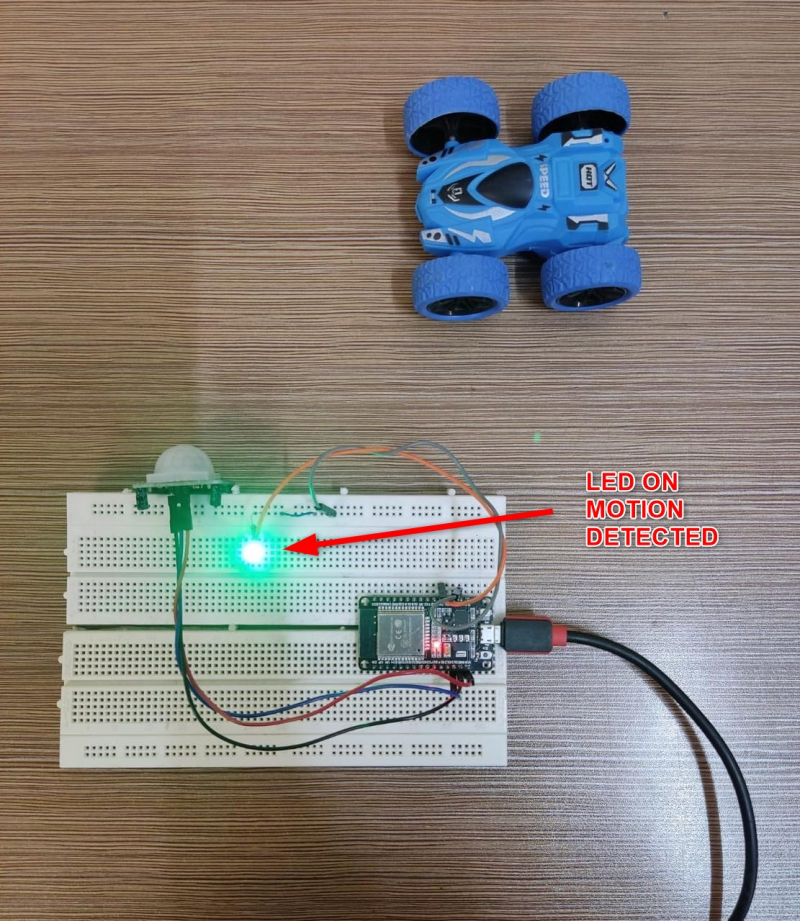
3.4: Выход
В разделе вывода мы видим, что объект находится вне зоны действия датчика PIR, поэтому ВЕЛ поворачивается ВЫКЛЮЧЕННЫЙ .
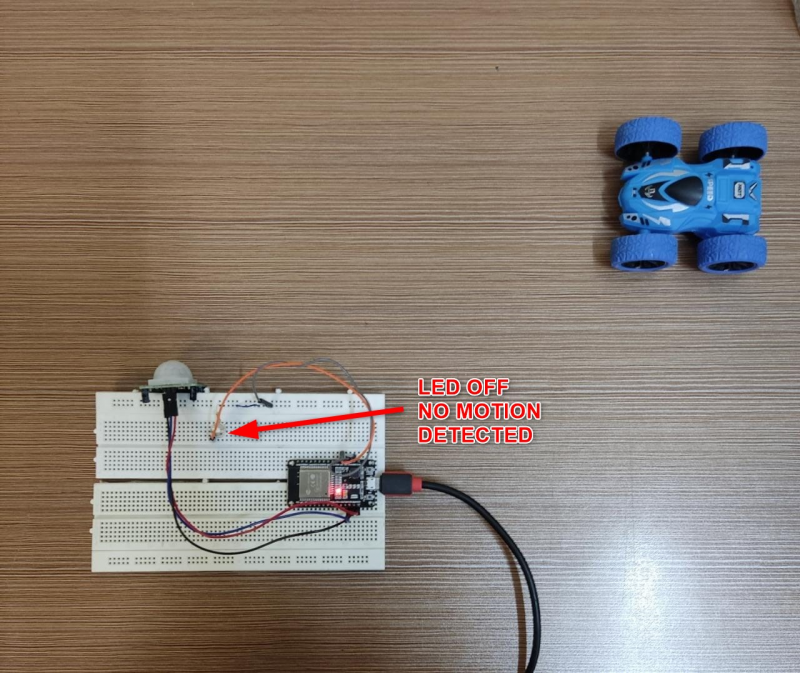
Теперь движение, обнаруженное светодиодом датчика PIR, загорится. НА за 5 сек после этого, если движение не обнаружено, оно останется ВЫКЛЮЧЕННЫЙ пока не будет получен следующий триггер.
Следующий вывод показан оболочка/терминал в Тонни IDE.
Вывод
Датчик PIR с ESP32 может помочь обнаружить движение различных вещей. Используя функцию прерывания в MicroPython с ESP32, мы можем инициировать ответ на каком-то конкретном выводе GPIO. При обнаружении изменения сработает функция прерывания и загорится светодиод.